Für die Filterung wurden keine Ergebnisse gefunden!

Diese langlebigen (aber erschwinglichen!) Getriebemotoren (auch bekannt als 'TT'-Motoren) sind eine einfache, kostengünstige Möglichkeit, Ihre Projekte in Bewegung zu bringen. Dies ist ein TTT-DC-Bi-Metall-Getriebemotormit einem Übersetzungsverhältnis von 1:90, was etwa dem Doppelten der 'Standard'-Übersetzung von 1:48 entspricht. Das gibt ihnen ein höheres Drehmoment, aber eine langsamere Drehzahl. Da sie langsamer sind, sind sie gut für Roboter, bei denen Kraft wichtiger ist als Geschwindigkeit.
Artikel-Nr.: ADA3801

Dies sind Standard-DC-Hobby-Motoren der Größe "130". Sie haben einen größeren Betriebsbereich als die meisten Spielzeugmotoren: von 4,5 bis 9VDC anstelle von 1,5-4,5V. Dieser Bereich macht sie perfekt für die Steuerung mit einem Adafruit Motor Shield, oder mit einem Arduino, wo Sie eher 5 oder 9V zur Verfügung haben als eine Hochstromeinstellung von 3V. Sie passen in die meisten Elektroniken, die bereits Motoren der Größe 130 installiert haben und es sind bereits zwei Breadboard-freundliche Drähte für schnelles Prototyping angelötet.
Artikel-Nr.: ADA711
NEU

Der Pneumat 2mm Silikonschlauch ist speziell für die Lebensmittelindustrie konzipiert und hält Temperaturen von -60 bis +180°C stand. Dieser Schlauch zeichnet sich durch seine Flexibilität und Beständigkeit gegenüber Lebensmittelkontakt aus, was ihn ideal für hygienische Prozesse macht.
Artikel-Nr.: REH-0204
NEU

Dieser 3mm Pneumat Silikonschlauch für die Lebensmittelindustrie besticht durch seine extreme Temperaturbeständigkeit von -60 bis 180°C und hohe Flexibilität, die ihn ideal für den sicheren Umgang mit Lebensmitteln macht. Er erfüllt hygienische Standards und ist chemikalienresistent.
Artikel-Nr.: REH-0306
NEU

Der Pneumat 1mm Silikonschlauch ist für den Einsatz in der Lebensmittelindustrie konzipiert und hält extremen Temperaturen von -60 bis 180°C stand. Ideal für anspruchsvolle Umgebungen, gewährleistet er Hygiene und Flexibilität bei der Handhabung von Lebensmitteln.
Artikel-Nr.: REH-0103

Dieses winzig kleine Servo kann sich um ca. 180 Grad drehen (90 in jede Richtung) und funktioniert genau wie die Standard-Servos, die Sie gewohnt sind, aber kleiner. Sie können jeden Servo-Code, jede Hardware oder Bibliothek verwenden, um diese Servos zu steuern. Gut für Anfänger, die etwas bewegen wollen, ohne einen Motorcontroller mit Feedback & Getriebe zu bauen, zumal es auch in kleine Räume passt. Natürlich ist es nicht annähernd so stark wie ein Standard-Servo. Funktioniert großartig mit dem Motor Shield für Arduino, oder durch einfaches Verdrahten mit der Servo-Bibliothek.
Artikel-Nr.: ADA4326
Machen Sie aufblasbare oder luftbetriebene Projekte mit dieser einfachen Luftpumpe. Sie ist ideal für Anfängerprojekte und super einfach zu bedienen! Die Pumpe ist im Grunde ein Gleichstrommotor, der mit ~4,5 V betrieben wird und etwa ~600 mA zieht. 5V sollten ausreichen, Sie können sie also mit dem gleichen Netzteil betreiben, das Sie auch für andere Gleichstrommotoren oder Servos verwenden.
Artikel-Nr.: ADA4700
Der erste Schritt in einem Robotikprojekt ist es, einen Motor zum Drehen zu bringen. Wenn man das getan hat, lernt man schnell, dass nicht alle Motoren die gleiche Geschwindigkeit haben, selbst wenn sie die gleiche Teilenummer haben! Es gibt immer Variationen, die mit der Spannung, der Umgebung und den Herstellungsänderungen zusammenhängen. Der zweite Schritt ist also, herauszufinden, wie schnell er läuft! Wie sich herausstellt, ist das gar nicht so einfach, aber der beste Weg ist, ein Encoderrad und einen optischen oder magnetischen Zähler hinzuzufügen. Wenn sich der Motor dreht, dreht sich das angebrachte Encoderrad, wodurch der Zähler jede vorbeilaufende...
Artikel-Nr.: ADA4416

Dieses drehmomentstarke Standardservo gibt es jetzt auch mit Metallgetriebe, für ein extra hohes Drehmoment (10 kg*cm!) und Zuverlässigkeit! Es kann mindestens 120 Grad (60 in jede Richtung) mit einem klassischen 1,5-2,5ms-Impuls drehen, aber wenn Sie Ihre Impulse verlängern können, kann es bis zu etwa 170 Grad gehen - es variiert ein wenig von Servo zu Servo. Sie können jeden Servocode, jede Hardware oder Bibliothek verwenden, um diese Servos zu steuern. Gut für Anfänger, die etwas bewegen wollen, ohne einen Motor-Controller mit Feedback & zu bauen; Getriebe. Kommt mit einem Bündel von Plastikhörnern, wie abgebildet. Wir führen jetzt...
Artikel-Nr.: ADA1142
Dieser komplett montierte Schwenk-Neige-Bausatz ist die perfekte Möglichkeit, Ihrem Projekt mit zwei Mikro-Servos den vollen Bewegungsradius zu geben . Der Schwenk-Neige-Bausatz kann sich um ca. 180° von Seite zu Seite drehen und um ca. 150° nach oben&unten neigen. Er wird auch komplett montiert geliefert, inklusive zwei Micro Servos (Typ SG-90 oder SG-92) und einem 38mm x 36mm großen Platz für die Montage einer Kamera oder eines Sensors oder was auch immer Sie möchten.
Artikel-Nr.: ADA1967

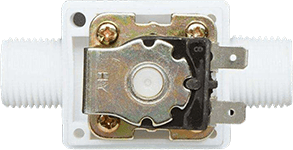
Steuern Sie den Fluss der Flüssigkeit mit dem Fluss der Elektronen! Dieses Flüssigkeitsventil wäre eine großartige Ergänzung für Ihr Roboter-Gartenarbeits-, Aquarium- oder Poolprojekt. Es gibt zwei 1/2"-Ausgänge (Nenn-NPS). Normalerweise ist das Ventil geschlossen. Wenn 12VDC an die beiden Klemmen angelegt werden, öffnet sich das Ventil und Wasser kann fließen. Anders als das Kunststoff-Magnetventil hat dieses keine Dichtung, so dass kein Mindestdruck erforderlich ist. Allerdings ist die Dichtung nicht perfekt. Im geschlossenen Zustand kann es zu Tropfen kommen, wenn Druck von der Wasserseite anliegt.
Artikel-Nr.: ADA996


Das 1501MG ist ein metallverzahntes Analogservo von Power HD, das ein besonders hohes Drehmoment liefert, das normalerweise mit viel teureren oder größeren Servos verbunden ist. Dies ist eines unserer beliebtesten Servos in Standardgröße. Servohörner und zugehörige Hardware sind im Lieferumfang enthalten.
Artikel-Nr.: POL1057


Dieser kompakte, preiswerte Kunststoff-Getriebemotor (bürstenbehafteter Gleichstrommotor mit einem 120:1 Untersetzungsgetriebe) ist gut für den Einsatz in kleinen Robotern geeignet. Er ist für den Betrieb bei 4,5 V vorgesehen, sollte aber bequem im Bereich von 3 V bis 6 V laufen. Das Getriebe hat eine D-förmige Abtriebswelle mit einer Länge von 9,7 mm und einem Durchmesser von 3 mm, die senkrecht zur Motorwelle steht, und eine eingebaute Sicherheitskupplung schützt das Getriebe vor übermäßigen Belastungen.
Artikel-Nr.: POL1124
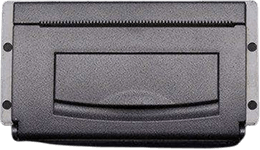
Füge jedem Mikrocontroller-Projekt einen wirklich kleinenDrucker hinzu, mit diesem sehr niedlichen Thermodrucker. Thermodrucker sind auch als Quittungsdrucker bekannt, sie sind das, was man bekommt, wenn man zum Geldautomaten oder in den Lebensmittelladen geht. Jetzt können Sie einen eigenen kleinen Drucker in ein Gehäuse einbauen. Dieser Drucker ist ideal für den Anschluss an einen Mikrocontroller oder Computer, da er einfach überUSBoderTTL Serialangeschlossen werden kann, um Text, Barcodes, Bitmap-Grafiken und sogar einen QR-Code zu drucken!
Artikel-Nr.: ADA2751
Mit diesem niedlichen Thermodrucker lässt sich jedes Mikrocontroller-Projekt um einen Mini-Drucker erweitern. Thermodrucker sind auch als Quittungsdrucker bekannt, sie sind das, was man bekommt, wenn man zum Geldautomaten oder in den Lebensmittelladen geht. Jetzt können Sie einen eigenen kleinen Drucker in ein Gehäuse einbauen. Dieser Drucker ist ideal für den Anschluss an einen Mikrocontroller. Sie benötigen lediglich einen seriellen 3,3V-5V TTL-Ausgang von Ihrem Mikrocontroller, um Text, Barcodes, Bitmap-Grafiken und sogar einen QR-Code zu drucken!
Artikel-Nr.: ADA597

Höre die gute Nachricht! Dieser kleine Lautsprecher ist eine großartige Ergänzung für jedes Audioprojekt, bei dem du eine Impedanz von 8 Ohm und eine Leistung von 1 W oder weniger benötigst. Uns gefällt dieser Lautsprecher besonders gut, weil er klein ist und mit schönen dünnen Kabeln mit einem Stecker am Ende geliefert wird. Er hat ein praktisches 2-poliges "Molex PicoBlade"-Kabel im 1,25-mm-Raster, das sich leicht in eine Platine einstecken lässt. Du kannst auch den Stecker abschneiden und die Drähte direkt anlöten oder anklemmen.
Dieser Lautsprecher hat ein kurzes ~10mm langes Kabel.
Dieser Lautsprecher hat ein kurzes ~10mm langes Kabel.
Artikel-Nr.: ADA4227

- Schallwandler-Typ: Lautsprecher
- Lautsprecher-Art: Miniatur, Mylar
- Leistung: 0.5W
- Max. Leistung: 1W
- Impedanz: 8Ω
- Äußere Abmessungen: 22x9x4mm
- Betriebstemperatur: -20...50°C
- Schallfrequenz: 0...8000Hz
- Lautstärke: 88dB
- Resonanzfrequenz: 1400Hz
- Höhe: 4mm
- Leitungslänge: 18mm
- Lautsprecher-Art: Miniatur, Mylar
- Leistung: 0.5W
- Max. Leistung: 1W
- Impedanz: 8Ω
- Äußere Abmessungen: 22x9x4mm
- Betriebstemperatur: -20...50°C
- Schallfrequenz: 0...8000Hz
- Lautstärke: 88dB
- Resonanzfrequenz: 1400Hz
- Höhe: 4mm
- Leitungslänge: 18mm
Artikel-Nr.: LD-SP-2209

Der 3001HB ist ein großartiger, universell einsetzbarer, preiswerter Standard-Analogservo von Power HD. Zwei Kugellager helfen, die Reibung zu reduzieren und die Leistung zu verbessern. Dies ist einer unserer beliebtesten Standard-Größe Servos. Servohörner und zugehörige Hardware sind im Lieferumfang enthalten.
Artikel-Nr.: POL1058
Zuletzt angesehen